Kráter Gale: Nový domov MSL Curiosity
Dne 26. listopadu 2011 v 15:02 UTC z floridského Cape Canaveral Space Force Station odstartovala nosná raketa Atlas V 541 a na osmiměsíční cestu k Marsu se tak vydal v pořadí již čtvrtý rover NASA Mars Science Laboratory, který byl pojmenovaný jako Curiosity (v překladu Zvědavost). Jeho cílem byl velký impaktní kráter Gale v oblasti Aeolis. Hlavním posláním mise bylo zkoumat, zda v minulosti panovaly na Marsu takové podmínky, které by mohly umožnit vznik života. To však nebyl jediný úkol. Rover měl také zkoumat úlohu vody při utváření povrchu Marsu, studovat jeho klima a geologii. Oproti svým předchůdcům byl konstrukčně navržený na mnohem delší životnost, minimálně na jeden rok.
Přistání v kráteru Gale
Po 253 dnech, 14 hodinách, 15 minutách a 57,1 sekundách meziplanetárního letu přistála mobilní laboratoř MSL Curiosity v kráteru Gale. Přistání se uskutečnilo 6.8.2012 05:17:57,3 UTC (15:03:14 LMST), kdy se podvozek sondy poprvé dotkl povrchu Marsu.

Pokud si odmyslíme to, že MSL je zatím nejtěžší a největší sondou, která kdy na Marsu přistála (hmotnost 899 kg a velikost malého auta), probíhal let k Marsu i počátek vlastního přistání již jako zaběhnutá rutina. Během letu byly provedeny čtyři korekce dráhy. Plánovaných jich bylo šest, avšak navádění sondy bylo tak přesné, že zbývající dva nebyly potřebné.
Počáteční fáze přistání proběhly standardním způsobem. Aerodynamické brzdění v atmosféře a pak další zpomalení sondy pomocí padáku. Poslední fáze přistání však proběhla zcela jinak a stala se nejriskantnějším a i nejkomplikovanějším přistáním na cizím tělese v historii nepilotovaných letů.
V předchozích případech sondy v závěrečné fázi buď přistávaly pomocí vlastních motorů (Viking, Phoenix) nebo v případě roverů (Pathfinder, MER) byly obloženy velkým počtem airbagů, které ztlumily dopad na povrch po oddělení od padákového systému. Vlastní vozítka pak byla ještě umístěna na speciální přistávací plošině. Pro velkou hmotnost a rozměry však u MLS Curiosity nepřipadal v úvahu ani jeden z těchto způsobů přistání.
Konstruktéři sondy nakonec zvolili podobný systém, jaký používají vrtulníky k přenášení nakladu a jeho ukládání na zemský povrch. Sonda byla připevněna pod speciální raketový stupeň s označením Sky Crane, který nahradil vrtulník. Ten se aktivoval sekundu po odhození aerodynamického štítu s padákem. V té chvíli se Curisity nacházela ve výšce ~1 620 m, pohybovala se rychlostí 450 km/h a do přistání zbývalo 56 s. Sky Crane pomocí osmi raketových motorů, každý o tahu 3,3 kN, začal snižovat rychlost na konečných 0,75 m/s. Ve výšce 18,6 m nad povrchem a při rychlosti klesání 0,75 m/s se uvedl do provozu odvíjecí systém a tím začalo vlastní spouštění Curiosity na třech popruzích k povrchu Marsu, které trvalo 17 s. Během spouštění roveru se vyklopila kola jeho podvozku a ve výšce necelých 9 m došlo ke stabilizaci a zklidnění celé sestavy Sky Crane - Rover. Teprve poté byla Curiosity usazena na povrch. Nakonec pyrotechnické nálože přesekly spuštěcí popruhy a tím i skončila cesta MSL Curiosity k Marsu. Sky Crane poté odlétl, a po 4 s letu již nekontolovaně dopadl na povrch ve vzdálenosti 650 m od místa přistání roveru.
I přes velkou složitost a obtížnost tohoto přistání odvedl Sky Crane skvělou práci, když uložil vozítko Curiosity na povrch Marsu rychlostí 0.75 m/s. Horizontální složka rychlosti přitom činila pouhé 4 cm/s. Jenom pro představu, na Zemi rychlostí 0.75 m/s za sekundu dopadne těleso, pokud spadne z výšky 3 cm (na Marsu 8 cm). Přistání MSL Curiosity bylo tedy i přes jeho složitost velice šetrné a měkké. Na areocentrických souřadnicích 137° 26′ 29″ v.d., 4° 35′ 22″ j.š. a elevaci −4 501 m tak MSL Curiosity započala svůj sol 0 na povrchu Marsu.
Kráter Gale
Kráter Gale, ve kterém přistála MSL Curiosity, vznikl impaktem velkého meteoru před 3,5 až 3,8 miliardami let. Bylo to geologické období označované jako noachian, kdy byl povrch Marsu velice intenzivně bombardován kosmickými tělesy. Předpokládá se, že v tomto období, byla velká část povrchu Marsu pokrytá oceánem, který se pravděpodobně nacházel i v oblasti kráteru Gale. Geologická minulost kráteru a někdejší přítomnost vody, byla hlavním důvodem, proč byl zvolen za místo přistání MSL, která má zjistit, zda v minulosti Marsu byly vhodné podmínky pro vznik života.
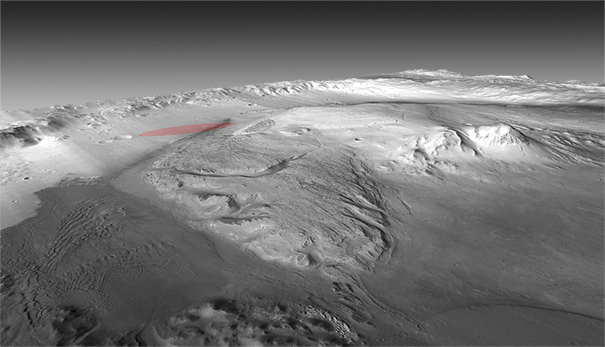
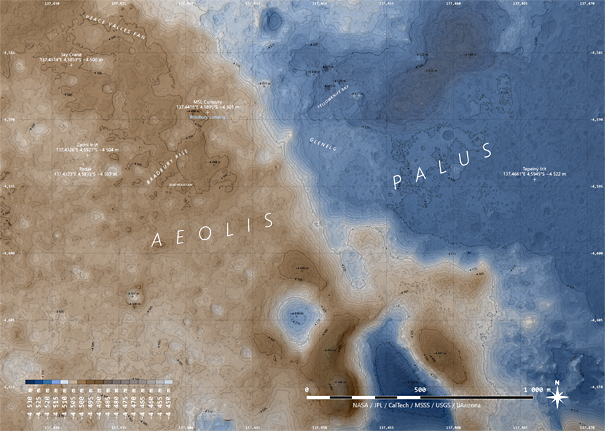
Vizualizace 3D vnitřku kráteru Gale zhotovená v GIS z DTM mozaiky osmi párů snímků CTX pořízených sondou MRO. Přistávací elipsa MSL Curiosity leží poblíž úpatí hory Aeolis Mons v severozápadní části kráteru.
Kredit: NASA / JPL / Caltech / MSSS, DTM: Natural History Museum, London
Kráter má průměr 154 km. V jeho centrální části se tyčí hora Aeolis Mons, někdy také označovaná jako Mount Sharp, která se od jižního dna kráteru zvedá až do výšky 4.5 km. Ze severní strany je převýšení ještě o 1 km větší. A právě tato hora je celém kráteru Gale nejzajímavější. S největší pravděpodobností vznikla erozí sedimentů, které se nad kráterem usazovaly, když byl ještě zalit vodou. Ty po ústupu oceánu začaly nerovnoměrně erodovat a v dnešní době zůstala pouze hora v cetrální části kráteru s hojně odkrytými sedimentálními vrstvami, které by mohly poskytnout pohled až do 2 miliardy roků vzdálené minulasti Marsu. A pokud kdysi na této planetě existoval život alespoň na úrovni mikroorganismů, mohly by být jeho fosílie nalezeny právě v těchto vrstvách usazenin.
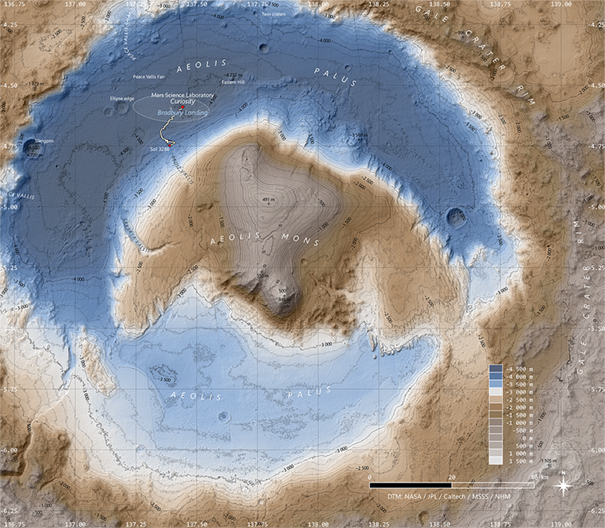
Topografická mapa káteru Gale s vyznačením přistávací elipsy a místa přistání. Na mapce je také vyznačena trasa roveru Curiosity do solu 3 286.
Kredit: NASA / JPL / Caltech / MSSS, DTM: Natural History Museum, London
Místo přistání
Při výběru místa přistání kromě vědeckých cílů, aby bylo možné naplnit cíle mise, se také musí přihlédnout k technické proveditelnosti celého procesu přistání, které ve výsledku rozhoduje, zda mise skončí úspěchem, či neúspěchem. Z orbitálních snímků se sestavují digitální modely terénu DTM, ze kterých se vyhodnocují vlastnosti povrchu určené pro přistání. Sleduje se zejména elevace, sklon a drsnost povrchu, v případě roverů pak ještě průchodnost terénu.
Velikost a hmotnost roveru Curiosity o rozměrech menšího automobilu s hmotností 899 kg kladla pro úspěšné přistání přísná a pro výběr cílového místa limitující požadavky. Přistávací místo muselo ležet v rozmezí ±30° areoecentrické šířky a nesmělo přesáhnout elevaci −1 000 m vzhledem k výškové stupnici MOLA. V měřítku 1 km nesměl reliéf terénu přistávací oblasti přesahovat převýšení 100–130 m a s maximálním sklonem 30° v měřítku 2–5 m. Musela být menší pravděpodobnost než 0,5%, že na ploše 4 m² se nevyskytne větší povrchový útvar než 0,55 m. Pro sestupový radar, který v závěrečné fázi přistání kontroloval výšku sondy nad povrchem musela ležet reflektivita povrchu v rozmezí -20 dB až 15 dB v pásmu Ka. Uvedená kritéria musela splňovat oblast vymezená přistávací elipsou 25×20 km jejíž velká poloosa byla orientovaná směrem východ-západ. Tato velikost přistávací elipsy byla daná přesností naváděcího systému sondy. Pro variantu místa přistání v kráteru Gale měla přistávací elipsa rozměry 21×7 km s plochou 92 km², která ležela v oblasti Aeolis Palus poblíž severozápadního úpatí hory Aeolis Mons.
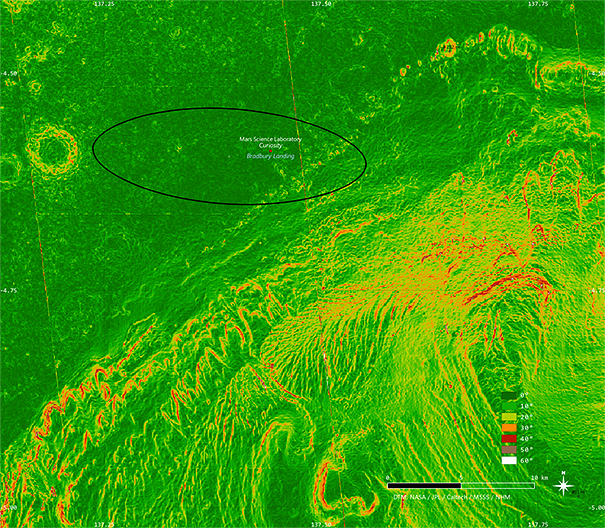
Mapa káteru Gale zobrazující sklon terén v blízkém okolí přistávací elipsy MSL Curiosity. Dvě šikmé čáry na mapce jsou artefakty, které vznikly ne zcela podařeným spojením dvou DEM vrstev v GIS.
Kredit: NASA / JPL / Caltech / MSSS, DTM: Natural History Museum, London
Za použití GIS a DTM modelu kráteru Gale vytvořeného ze stereo párů snímků CTX v NHM v Londýně, který nemusí být zcela přesný, můžeme získat alespoň odhad charakteristik terénu v oblasti vymezené přistávací elipsou. Její střední elevace vzhledem k MOLA má hodnotu −4470 m se stření směrodatnou odchylkou 34 m. Jedná se většinou o plochou oblast s maximálním rozsahem převýšení 234 m. Nejvíce nerovností najdeme ve východní části přistávací elipsy. Střední nerovnost terénu nepřesahuje 4°. Pouze na několika malých místech opět ve východní části dosahuje sklon terénu 53°. Mnohem přesnější údaje však poskytuje DTM vytvořený ze stereo párů snímků HiRISE (až bude čas).
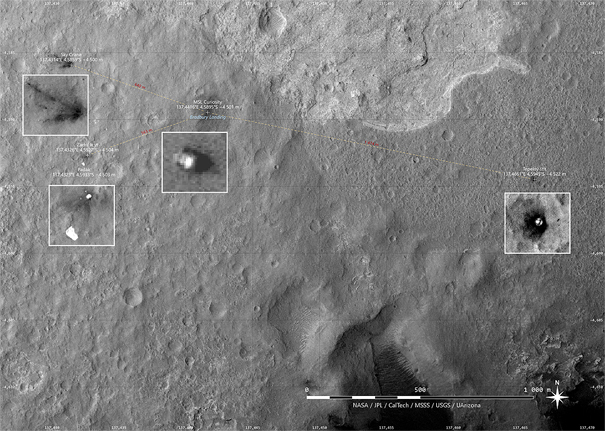 Snímek oblast místa přistání Curiosity, který pořídila sonda MRO kamerou HiRISE šest dní po přistání roveru. Na snímku je dobře viditelný jak samotný rover, tak i místa dopadu Sky Crane, zadního krytu s padákem i tepelný štít.
Snímek oblast místa přistání Curiosity, který pořídila sonda MRO kamerou HiRISE šest dní po přistání roveru. Na snímku je dobře viditelný jak samotný rover, tak i místa dopadu Sky Crane, zadního krytu s padákem i tepelný štít.
 Topografická mapa vytvořená z DTM přistávací oblasti. Tento digitální teréní model byl vytvořený týmem MSL z mozaiky stereo párů snímků HiRISE sloužil pro vyhodnocení rizik přistání v kráteru Gale během přípravy mise.
Topografická mapa vytvořená z DTM přistávací oblasti. Tento digitální teréní model byl vytvořený týmem MSL z mozaiky stereo párů snímků HiRISE sloužil pro vyhodnocení rizik přistání v kráteru Gale během přípravy mise.
Rover Curiosity
Mars Science Laboratory – marsovská vědecká laboratoř, zkráceně MSL, je oficiální název sondy a je i názvem této mise k planetě Mars. Jedná se o šestikolové mobilní zařízení, které je svou velikostí srovnatelné s malým automobilem. Na délku rover, jak se této sondě říká, měří 2,9 m, šířka je 2,7 m a je 2,2 m vysoký. Jeho hmotnost je 3 893 kg, přičemž 80 kg tvoří vědecké vybavení.
Šestikolový podvozek je tvořený šesti koly o průměru 50 cm. Každé z kol má vlastní odpružení, individuální natáčení pomocí servomotorů a má vlastní stejnosměrný bezkartáčový motor Maxon včetně převodovky s vysokým převodovým poměrem. Světelná výška podvozku je 60 cm. Konstrukční rychlost roveru je 10 cm/s, ale reálně na pevném rovném povrchu nepřesahuje 5 cm/s. Na každém kole je vzor •−−− •−−• •−••, který kola tisknou do stopy na povrchu, v morseovce to znamená JPL. Tento vzor má přesný rozměr a umožňuje tak navigačním kamerám odhad ujeté vzdálenosti. Konstrukčně může rover zdolávat svahy až do sklonu 50°, ale navigační systém neumožňuje roveru pohyb po svahu nad 30° pro pevný povrch a nad 12,5° pro měkký povrch, a může zdolávat překážky až do velikosti 65 cm.

Rozmístění přístrojů na roveru Curiosity. Šipky ukazují na jednotlivé přístroje, čáry ukazují směr k místu umístění přístroje, který není na tomto obrázku vidět.
Kredit: NASA / JPL-CalTech
Kamerový systém
Rover je osazený celkem 17 kamerami určenými k navigaci a pro vědecké účely. Některé z nich jsou však redundantní pro případ selhání.
HazCam (Hazard Avoidance Camera): kamery poskytují zobrazování blízkého pole do vzdálenosti 5 m, pro autonomní navigační systém, který z těchto dat se vytváří a následně vyhodnocuje mapy blízkého okolí a detekuje možné překážky. Na roveru je jich osazeno celkem 8. Dva páry jsou namontovány ve středu předního a zadního panelu roveru. Přední kamery jsou ve výšce 68 cm nad povrchem, zadní ve výšce 78 cm. Další dva páry jsou umístěné bočně poblíž pravého a levého předního kola roveru. Vzhledem k nadiru svírají kamery úhel 45°. Každá z kamer váží 245 g a pokud není zapotřebí vyhřívání, má spotřebu 2,2 W. Kamery používají CCD 1024×1024 pixelů s velikostí pixelu 12 μm. Kamery mají ohniskovou vzdálenost 5,358 a mají zorný úhel 124°×124°.
NavCam (Navigation Camera): kamery se využívají k rychlé analýze terénu pro plánování aktivit roveru, výběr cílů výzkumu a slouží pro podporu operací robotického ramene. Dva páry kamer jsou namontované na levé a pravé straně hlavice stožáru pod kamerou ChemCam. Horní dvojice je ve výšce 1,99cm, spodní dvojice ve výšce 1,94cm. Každý pár kamer má stereo základnu 42,4 cm. Kamery používají CCD 1024×2048 pixelů s velikostí pixelu 12 μm. Kamery mají ohniskovou vzdálenost 14,67 mm se zorným úhlem 45°×45°. Hloubka zobrazovaného pole je od 0,5 m do nekonečna.
MastCam (Mast Camera): je dvojice vědeckých kamer, které jsou umístěné na hlavici stožáru ve výšce 1,97 cm s rozestupem 24,2 cm. V původním návrhu se jednalo o dvě identické kamery s měnitelnou ohniskovou vzdáleností 6,5-100 mm. V roce 2007 však NASA nařídila návrh kamer upravit a zoom odstranit. Ve výsledné realizaci je MastCam složena ze dvou kamer s různými ohniskovými vzdálenostmi. Levá kamera M-34 má ohniskovou vzdálenost 34 mm, pravá M-100 pak ohniskovou vzdálenost 100 mm. Každá z kamer je vybavena filtry (nejsou pro obě kamery identické) pro různé vlnové délky světla.
Komunikace se Zemí
Rover Curiosity je vybavený celkem třemi anténami, které jsou umístěné na horní zadní části těla vozidla. Jsou to antény UHF, LG (Low Gain) a HG (High Gain). Antény slouží jednak pro přímou komunikaci se Zemí (antény LG a HG) nebo k přenosu dat prostřednictvím sond na oběžné dráze Marsu (anténa UHF).
Anténa s nízkým ziskem (LGA): je tyčová všesměrová pevná anténa pro pásmo X-band ve frekvenčním rozsahu 7-8 GHz pro vysílání a příjem. Je určena hlavně pro příjem instrukcí pro rover přímo ze Země prostřednictvím sítě radioteleskopů DSN a tvoří základ komunikace se Zemí. Přenosová rychlost je velice malá, přibližně 15 bps.
Anténa s vysokým ziskem (HGA): je směrová polohovatelná anténa pro pásmo X-band ve frekvenčním rozsahu 7-8 GHz pro vysílání a příjem. Umožňuje přímou komunikaci se Zemí přes síť DSN rychlostí až 32 kbps.
Anténa UHF: je všesměrová pevná anténa pro vysílání a příjem na frekvenci ~400 MHz. Je určená k přenosu dat na Zemi prostřednictvím sond na oběžné dráze Marsu. Přenosová rychlost závisí na možnostech orbiterů. Pro MRO může rychlost komunikace dosahovat až 2 Mbps, pro Mars Odyssey je to pouze 256 kbps.
Zdroj energie
Zdrojem energie roveru Curiosity je radioizotopový energetický systém RPS. Ten je tvořený radioizotopovým termoelektrickým generátorem RTG založeným na radioaktivním rozpadu Pu 238. Vytvářené teplo, které vzniká při radioaktivním rozpadu je pak soustavou termočlánků převedeno na elektrickou energii.
RTG na roveru Curiosity obsahuje 4,8 kg oxidu plutoničitého ²³⁸PuO₂ s poločasem rozpadu plutonia 87,8 roků, který vytvářel na počátku mise v roce 2012 tepelný výkon 2 kW a výsledný elektrický výkon 110 W. Vlivem úbytku plutonia radioaktivním rozpadem se tak po deseti letech sníží elektrický výkon RTG na 102 W a po dvaceti na 94 W, za předpokladu, že se příliš nesniží učinnost termočlánků.
Energetický systém roveru také obsahuje dvě lithium-iontové baterie s kapacitou 42 Ah, které pomáhají s dodávkami elektrické energie, když pro některé aktivity roveru elektrický výkon RTG nestačí.
Aktuální poloha roveru
Na svou dlouhou cestu se Curiosity vydala 22. srpna 2012 (sol 16). Do 2.11.2021 rover urazil celkovou vzdálenost 26,55 km a zdolal převýšení od místa přistání 508 m.
Časomíra
V případě Curiosity je čas mise MT, který pro rover používá řídící středisko, místní střední sluneční čas LMST vztažený k dlouhodobě plánovaným souřadnicím místa přistání 137,4239°E 4.4868°S (nejedná se o střed finální přistávací elipsy). Místo o těchto souřadnicích leží západněji než místo, kde rover nakonec přistál. MT je tak zpožděný o 4,26 s oproti LMST v místě přistání.
V tabulce je zobrazený aktuální čas LMST (místní střední sluneční čas) v místě přistání, MT (Mission time), UTC a PST (Pasadena, USA).
Pohyb roveru
V současné době se rover MSL Curiosity pohybuje na severním úpatí hory Aeolis Mons poblíž okraje žlabu Gediz Vallis, který vede na vrchol hory. Nedaleko místa MSL se nalézá výraznější hora Rafael Navarro. Hora nese jméno mexického vědce astrobiologa Rafaela Navarra, který zemřel v lednu 2021 na komplikace způsobené onemocněním COVID-19. Rafael Navarro přispěl k návrhu laboratoře pro analýzu vzorků, která je umístěna na palubě MSL Curiosity.
Úpatí hory Rafael Navarro je od polohy MSL pro sol 3313 vzdálené 250 m a vrchol hory se nalézá ve výšce necelých 100 m.
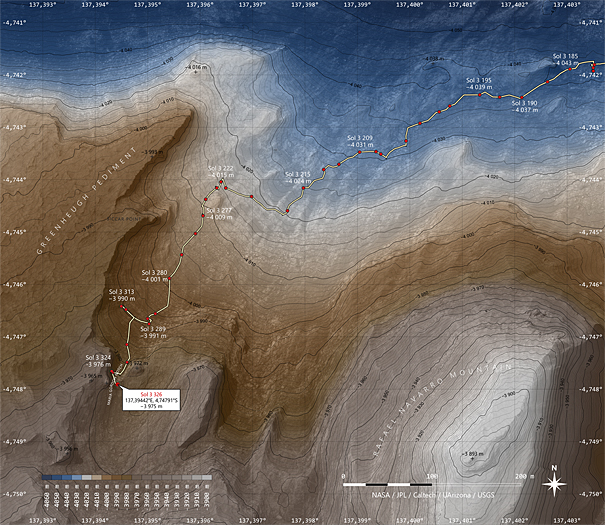 Topografická mapa okolí současného působení MSL Curiosity. Jako základ mapy je použitý DTM model zhotovený ze snímků HiRISE, který vytvořil tým MSL při přípravě mise pro analýzu terénu přistávací oblasti.
Topografická mapa okolí současného působení MSL Curiosity. Jako základ mapy je použitý DTM model zhotovený ze snímků HiRISE, který vytvořil tým MSL při přípravě mise pro analýzu terénu přistávací oblasti.
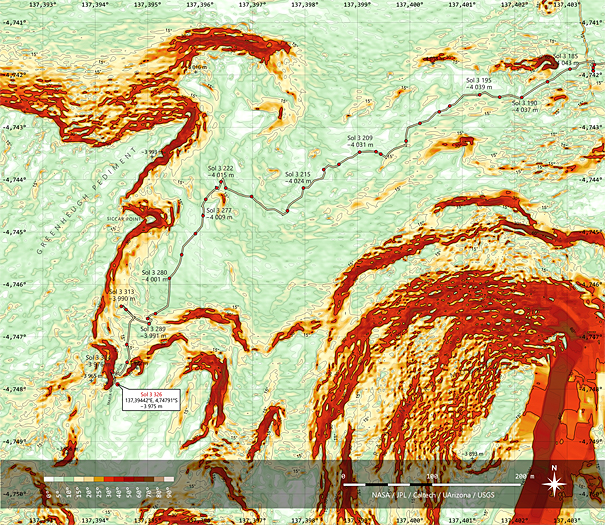 Mapa sklonu terénu okolí současného působení MSL Curiosity. Jako základ mapy je použitý DTM model zhotovený ze snímků HiRISE, který vytvořil tým MSL při přípravě mise pro analýzu terénu přistávací oblasti.
Mapa sklonu terénu okolí současného působení MSL Curiosity. Jako základ mapy je použitý DTM model zhotovený ze snímků HiRISE, který vytvořil tým MSL při přípravě mise pro analýzu terénu přistávací oblasti.
Podrobné mapky pohybu roveru od planetárního kartografa Philipa J. Stooka lze nalézt na serveru unmannedspaceflight.com. Velmi pěknou interaktivní mapu má i na stránkách NASA rover Curiosity, která ke zobrazena níže.
Interaktivní mapka NASA/JPL ukazující aktuální polohu roveru MSL Curiosity. Mapka je složena z mozaiky černobílých snímků kamery CTX zobrazující celý kráter Gale a z mozaiky barevných snímků s vysokým rozlišením pořízených kamerou HiRISE. Obě kamery jsou umístěné na sondě MRO obíhající planetu Mars.
Použité zdroje
[1] NASA JPL: Mars Science Laboratory Curiosity Rover
[2] SPACE 40: 2011-070A - Curiosity
[3] kosmo.cz: Mars Science Laboratory (MSL) alias Curiosity
[4] Wikipedia: Gale (crater)
[5] M. Golombek et al., 2012: Selection of the Mars Science Laboratory Landing Site.