Čínská mise k Marsu Tianwen-1: Rover Zhurong
Rover Zhurong (祝融) je součástí čínské mise Tianwen-1 (天问一号) k planetě Mars. 14.5.2021 ve 23:16:59 UTC přistávací plošina s roverem úspěšně přistála v jižní části Utopia Planitia na areocentrických souřadnicích 25.066°N, 109.925°E a elevaci −4101,9 m vzhledem k referenčnímu modelu Marsu IAU 2000. Čína se tak stala v pořadí druhou zemí, které se na Marsu podařilo úspěšně přistát, a i druhou zemí, které se to podařilo hned na první pokus. Délka mise roveru Zhurong na povrchu Marsu byla plánovaná na 90 solů (marsovských dnů).
Popis mise roveru Zhurong
Mise Tianwen-1 (TW-1) je první čínskou výpravou do hlubokého vesmíru, při které Čína teprve sbírá první zkušenosti. Pro takovou misi je klíčová nejenom konstrukce vlastní sondy, ale i její přesné navádění, a hlavně zajištění kvalitní komunikace se Zemí. Rover Zhurong navíc přistál ve velice zajímavé geologické oblasti a může přinést cenné vědecké výsledky.
Místo přistání
Přistávací plošina s roverem Zhurong dosedla na povrch Marsu v jižní části Utopia Planitia v oblasti, o které se předpokládá, že tvořila pobřeží moře v období hesparianu před 3,68-3,45 miliardami roků. Měření radarem SHARAD na sondě Mars Reconnaissance Orbiter a z nich odvozená dielektrická konstanta podpovrchového materiálu potvrzuje v této oblasti přítomnost vody/ledu pod povrchem přistávací oblasti. Její přítomnost naznačuje i morfologie této oblasti jako je například výskyt kuželových kopců s propadlými vrcholy, které mohou být vulkanického nebo jináho původu, ale mohou být vytvořené i přítomností vody/ledu v podpovrchovém materiálu.
Nejbližší okolí místa přistání v okruhu stovek metrů je ploché, s mírnými svahy terénu a s maximálním převýšením v jednotkách metrů. V této oblasti je i velice malá hustota výskytu skalnatých útvarů, jako jsou například balvany vetší než 0,5-1 m.
Vědecké experimenty
Na roveru je instalovaná sada šesti měřících přístrojů k provádění vědeckých experimentů, které rover provádí za jízdy nebo při svých zastávkách. Jsou to přístroje NaTeCam k pořizování stereo párů snímků okolí, které ve spolu se stereo snímky z kamery HiRIC umístěné na orbiteru umožňují vytvoření přesné a podrobné topografické mapy, spektrometr MarSCoDe a multispektrální kamery MSCam k provádění analýzy složení hornin, podpovrchový radar RoPeR pro zjišťování struktury půdy pod povrchem a ke zjišťování obsahu vodního ledu v horninách pod povrchem, detektor magnetického pole RoMAG a meteorologická stanice MCS, která měří teplotu, rychlost větru a zaznamenává zvuk.
Jedním z nejdůležitějších přístrojů umístěných na roveru Zhurong je kamera NaTeCam. Pro pořízení stereo snímků je kamera vybavena párem objektivů, které jsou od sebe vzdálené 27 cm a jsou umístěné ve výšce přibližně 180 cm nad povrchem na otočném rameni. Objektivy mají ohniskovou vzdálenost 13,1 mm. Každá z kamer pořizuje snímky 2048×2048 pixelů s fyzickou velikostí pixelu 5,5 μm a zorným úhlem 46.5°×46.5°.
Rover je ještě vybavený dvěma páry kamer HazCam, které jsou umístěné na spodní straně roveru v jeho přední a zadní části poblíž podvozku. Tyto kamery slouží k detekci překážek. Každá v kamer pořizuje snímky s rozlišením 1024×1024 pixelů se zorným úhlem 120°.
Energetický systém a tepelná ochrana
Sluneční konstanta v okolí Marsu má střední hodnotu 586 Wm⁻², což je 43% hodnoty sluneční konstanty ve vzdálenosti Země od Slunce, a značně kolísá v rozmezí 490 – 713 Wm⁻² pro vzdálenost Marsu od Slunce v aféliu a v perihéliu. Kromě toho je povrch Marsu díky jeho suchosti velice prašné prostředí. Velké množství rozptýleného prachu v atmosféře snižuje sluneční konstantu na marsovském povrchu a usedající prach na solárních panelech pak značně i snižuje jejich účinnost. To vše pak zvyšuje nároky nejenom na velikost solárních panelů, ale i na jejich design. Velký problém se zaprášeností solárních panelů se například projevil u sondy InSight.
Rover Zhurong je napájený solárními panely, které jsou potažené protiprachovou vrstvou, která brání usazování prachu. Během dosavadní mise se ukazuje, že tato antiprachová ochrana dosahuje účinnosti až 86%. Kromě solárních panelů je rover vybaven baterií nabíjenou částí energie ze solárních panelů. Baterie pak slouží k napájení důležitých systémů roveru a jejich vyhřívání v nočních hodinách.
| Přístroj | Příkon [W] |
|---|
| NaTeCam | 1,8 |
| MSCam | ≤8 |
| MarSCoDe | 64 |
| RoPeR | 26,5 |
| RoMAG | 5,5 |
| MCS | 11 |
Spotřeba elektrické energie jednotlivých přístrojů umístěných na roveru Zhurong.
Vzhledem k nízkým nočním teplotám, které klesají pod −73°C, je rover Zhurong vybavený pasivní a aktivní tepelnou ochranou. Pasivní ochranu tvoří dvě solární okna, která slouží ke sběru tepla ze slunečního záření v denních hodinách. Akumulované teplo se pak využívá k vyhřívání vnitřku roveru v noci a odlehčuje tak baterii, která se používá pro vyhřívání. Tepelná izolace je tvořena aerogelem a CO₂. Aktivní tepelnou ochranu zajišťuje vyhřívání pomocí baterie. Kromě vnitřku roveru jsou touto ochranou vybaveny vnější přístroje, které takovou ochranu vyžadují, jako jsou například kamery.
Pracovní režim roveru
Kvůli úspoře energie, je rover po většinu marsovského dne pouze v pohotovostním režimu, kdy jsou zapnuté pouze palubní počítače a většina měřících přístrojů je vypnutá, nebo se podle potřeby střídavě zapínají a vypínají.
Hlavní činnost roveru, která kromě vědeckých měření zahrnuje i jeho pohyb, je většinou mezi 11:00 LMST a 15:00 LMST, kdy jsou vyšší okolní teploty a je možné vypnout vyhřívání roveru.
| Přístroj | Rover je v pohybu | Rover stojí |
|---|
| NaTeCam | vypnuto | přerušovaně |
| MSCam | vypnuto | přerušovaně |
| MarSCoDe | vypnuto | přerušovaně |
| RoPeR | nepřetržitě zapnuto | vypnuto |
| RoMAG | přerušovaně | přerušovaně |
| MCS | přerušovaně | přerušovaně |
Režim práce jednotlivých přístrojů umístěných na roveru Zhurong.
Rover Zhurong pracuje ve třídenních cyklech. V každém cyklu probíhají vědecká měření, která nelze provádět při pohybu roveru, snímkování okolního terénu, jeho analýza a vytyčení další trasy, a nakonec vlastní pohyb.
Komunikace se Zemí
Hlavní komunikace mezi roverem Zhurong a Zemí je zprostředkovaná pomocí orbiteru TW-1. Jeho vysoce eliptická dráha je navržena tak, že její perioda je 1/3 siderické doby rotace Marsu. Pericentrem, které leží ve výšce 265 km téměř přímo nad roverem, přelétá každý den kolem 12:00 LMST, kdy jsou stahována data z roveru, předány instrukce roveru a je provedeno snímkování oblasti. Komunikační okno trvá přibližně 10 minut. Ke komunikaci se využívaná pásmo UHF. Rychlost komunikace se pohybuje v řádu Mbps. Pro tuto komunikaci je rover v pohotovosti každý den po dobu 1 h kolem marsovského poledne.
O 1,5 oběhu později, kolem půlnoci LMST, se orbiter TW-1 nachází v apocentru a rover i orbiter jsou opět v přímé viditelnosti. Délka tohoto komunikačního okna je přibližně 5 h. Velká vzdálenost však neumožňuje přenos velkého množství dat a využívá se hlavně ke stažení telemetrie roveru. Pohotovostní režim roveru, kdy rover je připraven přijmout data, pro tuto část komunikace trvá 5 hodin.
Kromě komunikace přes orbiter TW-1 má rover i možnost přímé komunikace se Zemí, kterou rover vidí téměř po celou dobu, kdy je i Slunce nad obzorem. Pohotovostní režim pro tuto komunikaci trvá každý den po dobu 10 hodin. Je to nejzákladnější komunikační kanál pro příjem instrukcí ze Země. Rychlost přenosu dat však nepřesahuje 7,8125 bps. Pro tuto komunikaci se vyžívá pásmo X (X-band).
Orbiter
Orbitální modul mise TW-1 setrvává na dráze, která je optimální pro přenos dat z roveru na Zemi až do konce října. Její změna je plánovaná až po probuzení roveru a orbiteru z nouzového režimu, do kterého by měly přejít 13. září. Důvodem pro přechod obou sond orbiteru i roveru do nouzového režimu je znemožnění komunikace se Zemí v důsledku konjunkce se Sluncem. Nouzový režim potrvá přibližně 50 dnů. Orbiter pohybuje po téměř polární dráze se sklonem 89,2297° a s periodou 0,341631 d. Je tedy dobře synchronizovaná se siderickou dobou rotace Marsu a nad roverem sonda přelétá každý třetí oběh ve výšce 265 km, kdy dochází ke snímkování oblasti a stažení dat z roveru. Vzhledem k tomu, že u této oběžné dráhy dochází k výraznému stáčení pericentra a délky výstupního uzlu, musela být dráha několikrát upravovaná, aby byla optimální pro možnost komunikace s roverem.
V pořadí již páté korekci dráhy došlo 8.11.2021, kdy orbiter zážehem hlavního motoru na 260 s, zvýšil svoji rychlost a oběžná doba se tak zkrátila na 7,08 h. Přešel tak na finální vědeckou dráhu, ze které bude provádět dálkový průzkum Marsu, která umožní pokrýt snímky téměř celý povrch planety během následujících 200 dní. Z této oběžné dráhy také použije podpovrchový radar, který až dosud na orbiteru nebyl v činnosti.
Měření času
V tiskových oznámení CNSA jsou časy událostí mise TW-1 obvykle uváděny v pekingském čase CST (UTC+8). Marsovský čas MT (Mission Time), podle kterého řídící středisko plánuje aktivity roveru Zhurong, je oproti LMST vztaženému k místu přistání posunutý o 15 minut a 39 sekund. Čas LMST je vztažený k upřesněným souřadnicím místa přistání 25,0662°N 109,9253°E podle mozaiky CTX.
Podobně jako tomu bylo u amerických roverů Spirit a Opportunity, používá mise roveru Zhurong čílování solů od čísla 1.
V tabulce je zobrazený aktuální čas LMST (místní střední sluneční čas) v místě přistání, MT (Mission time), UTC a CST.
Mapy s vyznačenou trasou roveru
Na následujících mapách je vyznačená poloha a trasa roveru. K určení polohy roveru jsou používané jednak snímky HiRISE ze sondy MRO, které jsou nejpřesnější, mapky s pohybem roveru od CNSA upřesněné na základě snímků NaTeCam, HazCam a za pomocí triangulace v GIS. K vytvoření map posloužily snímky HiRISE a CTX ze sondy MRO. Dlaždice celoplanetární mozaiky CTX byly použité pro registraci snímků HiRISE pro přesnější určení souřadnic.
Topografická mapa
Mapa v měřítku 1:14000 zachycuje širší okolí místa přistání, aby bylo patrné v jaké oblasti se rover Zhurong pohybuje, a pro odhad, do kterých míst asi směřuje. Mapa je vytvořena ze snímků HiRISE DTM s rozlišením 1m/pixel a s rozlišením v elevaci řádu 10 cm. Z mapy je patrné, že rover se pohybuje ve velice ploché oblasti s převýšením v řádu metrů.
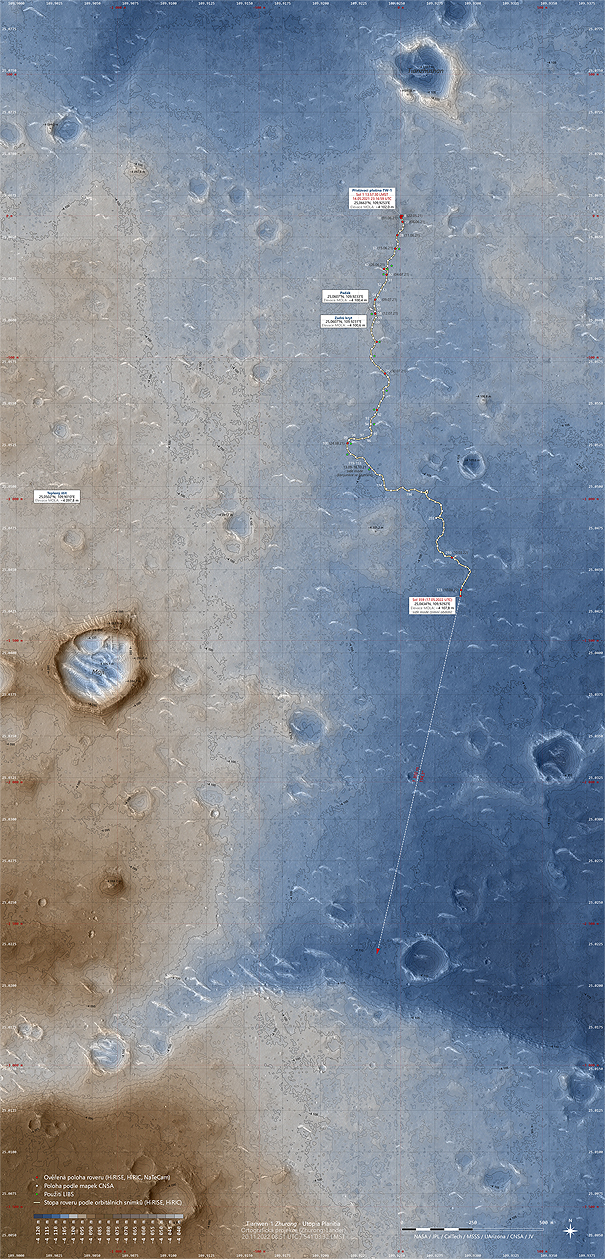 Topografická mapa oblasti místa přistání. Mapa je vytvořena ze snímků HiRISE DTM, které pořídila sonda MRO. Vrstevnice na mapě mají interval 2 m.
Topografická mapa oblasti místa přistání. Mapa je vytvořena ze snímků HiRISE DTM, které pořídila sonda MRO. Vrstevnice na mapě mají interval 2 m.
Podrobná mapa
Mapa v měřítku 1:1400 zachycuje detailní pohyb roveru. Šířka vyznačené trasy odpovídá šířce stopy, kterou rover zanechává na snímcích HiRISE. Délka jednoho dílku stopy odpovídá vzdálenosti připližně 2 m. K vytvoření mapy byl použitý snímek HiRISE s rozlišením 0,25m/pixel. Snímek byl registrovaný na dlaždici mozaiky CTX, což umožnilo zpřesnění souřadnic.
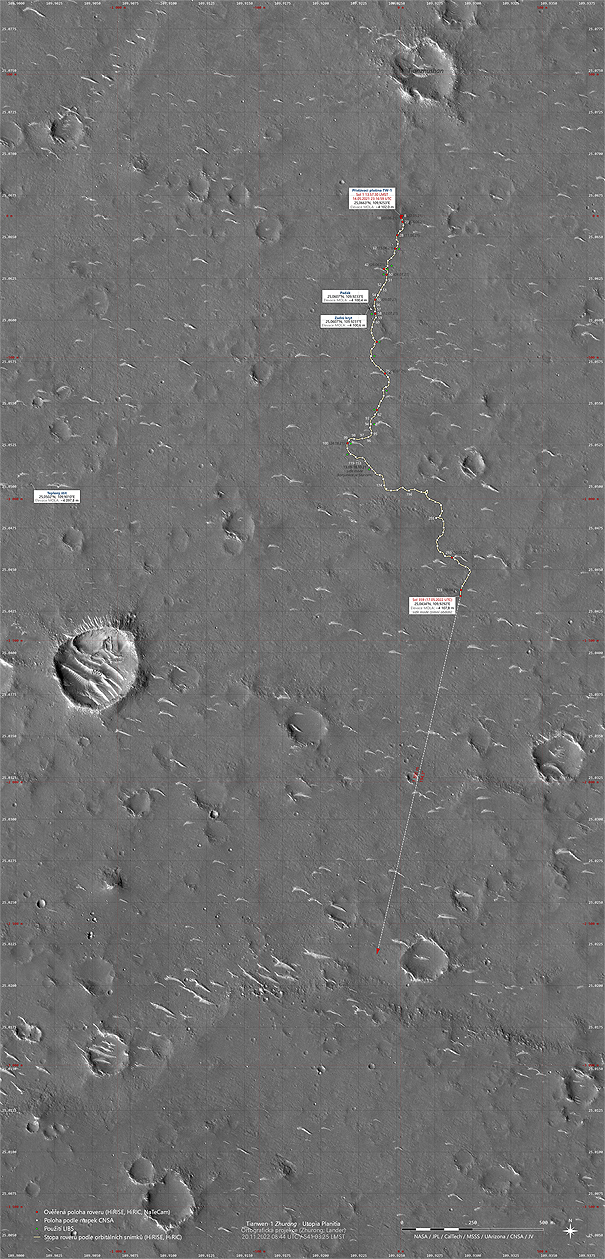 Oblast Utopia Planitia s vyznačením pohybu roveru Zhurong. Červené puntíky označují polohu roveru, která je ověřená z orbitálních snímků MRO HiRISE, případně TW-1 HiRIC nebo ze snímků z NaTeCam, které pořídil rover na povrchu. Bílá kolečka jsou polohy roveru podle mapek CNSA, ale jsou spíše jenom orientační. Na mapkách od CNSA je celá řada nepřesností a tyto polohy zatím není možné nezávisle ověřit.
Oblast Utopia Planitia s vyznačením pohybu roveru Zhurong. Červené puntíky označují polohu roveru, která je ověřená z orbitálních snímků MRO HiRISE, případně TW-1 HiRIC nebo ze snímků z NaTeCam, které pořídil rover na povrchu. Bílá kolečka jsou polohy roveru podle mapek CNSA, ale jsou spíše jenom orientační. Na mapkách od CNSA je celá řada nepřesností a tyto polohy zatím není možné nezávisle ověřit.
 Výškový profil trasy roveru Zhurong, který je vytvořený pomocí snímku HiRISE a elevační vrstvy DTM. Elevace je odečtena z DTM vrstvy pro vyznačenou trasu roveru na snímku HiRISE.
Výškový profil trasy roveru Zhurong, který je vytvořený pomocí snímku HiRISE a elevační vrstvy DTM. Elevace je odečtena z DTM vrstvy pro vyznačenou trasu roveru na snímku HiRISE.
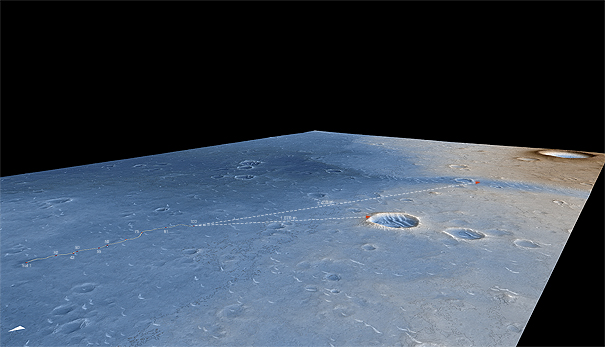 3D pohled ze severozápadního směru na oblast přistání roveru Zhurong s vyznařením ujeté trasy do sol 100. Velký kráter A o průměru necelých 300 m v pravé střední části obrázku by mohl být jeho prvním velkým cílem. Mapa je vytvořena pomocí DTM vytvořeného ze snímku HiRISE se sondy MRO týmem HiRISE.
3D pohled ze severozápadního směru na oblast přistání roveru Zhurong s vyznařením ujeté trasy do sol 100. Velký kráter A o průměru necelých 300 m v pravé střední části obrázku by mohl být jeho prvním velkým cílem. Mapa je vytvořena pomocí DTM vytvořeného ze snímku HiRISE se sondy MRO týmem HiRISE.
Časová osa
Naměřená vědecká data, mezi něž patří i přesně kalibrované snímky podléhají chráněnému režimu, který trvá několik měsíců. Během této doby jsou data k dispozici pouze domácím vědeckým institucím. Zveřejněná data však umožňují sledovat pohyb roveru po povrchu Marsu a určit jeho aktuální pozici.
CNSA nezveřejňuje příliš mnoho podrobností o tom, v jaký čas se rover Zhurong v daném místě pohyboval. Následující tabulka obsahuje jednak časy událostí, které zveřejnila CNSA nebo jsou odvozeny z jiných zdrojů, jako jsou snímky HiRISE ze sondy MRO, u kterých je vyhledatelný čas pořízení. Jsou to tedy časy, o kterých víme, že v tu dobu v daném místě rover opravdu byl (viz. mapka). Další časy jsou odvozeny ze světelných podmínek zveřejněných snímků. Nejpřesnější takto odhadnutý čas je u pořízených panoramat, kde lze poměrně přesně určit azimut Slunce a podle něj pak dopočítat čas pořízení snímku. Většina zveřejněných snímků byla pořízena kolem pravého poledne LTST, kdy je Slunce v místě roveru téměř v zenitu.
1. Sol 14:13:09MT | 1. Sol 13:57:30LMST | | 14.05.2021 23:16:59 UTC | 15.05.2021 07:16:59 CST |
|---|
| Úspěšné přistání sondy TW-1 na povrchu Marsu. Na přistávací plošině TW-1 rover Zhurong (祝融) zůstal až do 8. solu. Během této doby bylo provedeno oživení a testování systémů roveru. Byly pořízeny i první stereopáry snímků kamerou NaTeCam pro vytvoření digitálních modelů terénu DEM a DOM pro přesnou lokalizaci místa přistání. Z 12 snímků pořízených levou kamerou NaTeCam bylo sestaveno první zveřejněné panorama. |
8. Sol 13:01MT | 8. Sol 12:45LMST | | 22.05.2021 02:40 UTC | 22.05.2021 10:40 CST |
|---|
| Rover sjel po rampě z přistávací plošiny na povrch Marsu a zahájil tak průzkum jižní části oblasti Utopia Planitia, o které se předpokládá, že tvořila pobřeží pradávného moře. |
12. Sol ~11:44MT | 12. Sol ~11:29LMST | | 26.05.2021 ~04:00 UTC | 26.05.2021 ~12:00 CST |
|---|
| V prvních solech se rover pohyboval v blízkosti přistávací plošiny. V tento sol se rover přiblížil do její bezprostřední blízkosti, pořídil její detailní snímky a snímek půdy přímo pod plošinou, na kterém je viditelná hluboká jáma, která byla vyhloubena spalinami přistávacích motorů během přistání |
18. Sol 11:55MT | 18. Sol 11:40LMST | | 01.06.2021 08:09 UTC | 01.06.2021 16:09 CST |
|---|
| Byl pořízen videozáznam pohybu roveru a jeho společný snímek s přistávací plošinou. To bylo provedeno pomocí malé Wi-Fi kamery, která byla vysunuta na povrch ze spodní části roveru. |
23. Sol 15:45:42MT | 23. Sol 15:30:03LMST | | 06.06.2021 15:23:00 UTC | 06.06.2021 23:23:00 CST |
|---|
| Americká sonda MRO (Mars Reconnaissance Orbiter), která obíhá kolem Marsu a snímkuje jeho povrch, pořídila první snímek HiRISE přistávací oblasti TW-1. Snímek má rozlišení 0,25 m/pixel a kromě přistávací plošiny TW-1 a roveru Zhurong je na něm vidět i zřetelná stopa od kol roveru. Ze snímků HiRISE je tedy možné přesně lokalizovat nejenom samotný rover, ale zjisti i jeho trasu. |
28. Sol 15:51:36MT | 28. Sol 15:35:57LMST | | 11.06.2021 18:47:00 UTC | 12.06.2021 02:47:00 CST |
|---|
| Americká sonda MRO pořídila druhý snímek HiRISE přistávací oblasti TW-1, který spolu s prvním snímkem tvoří stereopár. Stereopáry pořizuje MRO poměrně často. Jsou to snímky stejné oblasti, ale jsou pořízené z různých poloh orbiteru. Z takto pořízených snímků je pak možné vytvořit DTM a následně i topografickou mapu. Vertikální rozlišení DTM se pohybuje v řádu 10 cm. |
32. Sol 16:25MT | 32. Sol 16:10LMST | | 15.06.2021 22:00 UTC | 16.06.2021 06:00 CST |
|---|
| Pořízení druhého zveřejněného panoramatu. Uvedený čas je střední čas pořízení snímků ve směru ke Slunci. Čas pořízení snímků směrem ke Slunci byl vypočtený pomocí přesných efemerid JPL DE440 a rotačního modelu Marsu IAU 2000. Azimut Slunce byl odečtený přímo ze snímků panoramatu pro jednotlivé kanály RGB a různé světelné křivky. Před tím však byla zkalibrována stupnice azimutu na snímku panoramatu pomocí měření azimutů povrchových útvarů na snímku HiRISE. Panorama je sestaveno z 12 snímků pořízených pravou kamerou NaTeCam. |
42. Sol ~11:56MT | 42. Sol ~11:41LMST | | 26.06.2021 ~00:00 UTC | 26.06.2021 ~08:00 CST |
|---|
| Rover ujel celkovou vzdálenost 236 m, přiblížil se k první písečné duně a zahájil její zahájil průzkum. CNSA zveřejnila snímek této duny. Duny v oblasti přistání TW-1 mají tvar půlměsíce. Tímto tvarem jsou charakteristické duny, které se nazývají barchany. Jejich konce míří ve směru větru a z toho lze odvodit, že v této oblasti převažuje severní směr větru. |
50. Sol ~12:38MT | 50. Sol ~12:23LMST | | 04.07.2021 ~06:00 UTC | 04.07.2021 ~14:00 CST |
|---|
| Rover Zhurong ukončil průzkum první písečné duny, od které odjíždí jižním směrem. CNSA zveřejnila snímek duny z jižní strany. |
57. Sol 13:59MT | 57. Sol 13:43LMST | | 11.07.2021 12:00 UTC | 11.07.2021 20:00 CST |
|---|
| Rover se nachází severovýchodně poblíž místa, kam dopadl padák se zadním krytem. Podle odometru rover dosud urazil celkovou vzdálenost 410,025 m. |
58. Sol ~16:16MT | 58. Sol ~16:00LMST | | 12.07.2021 ~15:00 UTC | 12.07.2021 ~23:00 CST |
|---|
| Rover se přiblížil na 30 m k zadnímu krytu a pořídil jeho společný snímek s padákem. Ze snímku byla určená poloha roveru, která však neodpovídá ani jedné z poloh na mapce CNSA. Rover při pořizování snímku by měl být západněji, než je na mapce CNSA vyznačeno. Střed zadního krytu je vzdálený 348,7 m od středu přistávací plošiny v místě přistání. |
60. Sol 23:44MT | 60. Sol 23:29LMST | | 15.07.2021 00:00 UTC | 15.07.2021 08:00 CST |
|---|
| Rover urazil celkovou vzdálenost 450 m. |
63. Sol 13:03MT | 63. Sol 12:48LMST | | 17.07.2021 15:00 UTC | 17.07.2021 23:00 CST |
|---|
| Rover urazil celkovou vzdálenost 509 m. |
75. Sol | 75. Sol | | 30.07.2021 UTC | 30.07.2021 CST |
|---|
| Rover urazil celkovou vzdálenost 708 m. |
83. Sol 07:01MT | 83. Sol 06:46LMST | | 06.08.2021 22:00 UTC | 07.08.2021 06:00 CST |
|---|
| Rover urazil celkovou vzdálenost 808 m. |
90. Sol 23:59:59MT | 90. Sol 23:44:20LMST | | 14.08.2021 20:03:14 UTC | 15.08.2021 04:03:14 CST |
|---|
| Koncem 90. solu končí rover i primární část mise, během které urazil celkovou vzdálenost 889 m. CNSA oznámila, že rover Zhurong i orbiter TW-1 jsou v dobrém stavu a rover bude pokračovat v dalším průzkumu. Podle dřívějších informací měl orbiter po tomto datu změnit oběžnou dráhu snížením apocentra dráhy, což by mu umožnilo postupně osnímkovat celý povrch planety. Změna výšky apocentra se však projeví zkrácením oběžné doby, a možnost komunikace s roverem nebude každých 24h marsovského času. Doba mezi komunikačními okny se značně prodlouží. Později bylo oznámeno, že na novou oběžnou dráhu přejde orbiter až koncem října. |
99. Sol 02:27MT | 99. Sol 02:11LMST | | 23.08.2021 03:51 UTC | 23.08.2021 11:51 CST |
|---|
| Rover ujel celkovou vzdálenost 1000 m. K této příležitosti CNSA zveřejnila snímek velkoplošné obrazovky z řídícího střediska mise roveru Zhurong. Z údajů na obrazovce bylo možné upřesnit čas přistání na Marsu, způsob počítání solů a časový posun mezi LMST a MT. |
99. Sol 23:59:59MT | 99. Sol 23:44:20LMST | | 24.08.2021 01:59:31 UTC | 24.08.2021 09:59:31 CST |
|---|
| Rover začíná 100. sol na povrchu Marsu, během kterého pořizuje třetí zveřejněné panorama. V tento sol pořídila sonda TW-1 zveřejněný snímek přistávací oblasti kamerou HiRIC, na které je zřetelná stopa pohybu roveru. |
105. Sol 18:12MT | 105. Sol 17:56LMST | | 30.08.2021 00:00 UTC | 30.08.2021 08:00 CST |
|---|
| Rover urazil celkovou vzdálenost 1064 m. |
119. Sol | 119. Sol | | 13.09.2021 UTC | 13.09.2021 CST |
|---|
| Rover urazil celkovou vzdálenost 1 182 m. Z důvodu přerušení komunikace se sondou Tianwen-1 a s roverem Zhurong během nadcházející konjunkce Marsu se Sluncem, byly rover i orbiter převedeny do nouzového režimu. Obnovení komunikace se předpokládá v polovině října. |
153. Sol | 153. Sol | | 18.10.2021 UTC | 18.10.2021 CST |
|---|
| Po ukončení sluneční konjukce bylo opět navázáno spojení s roverem i s orbiterem, které se postupně vrátí k plánované činnosti. Počátkem listopadu přejde orbiter na vědeckou oběžnou dráhu, ze které bude probíhat průzkum Marsu. Komunikace s roverem pak už nebude tak častá, jako tomu bylo doposud. |
173. Sol 09:51:20MT | 173. Sol 09:35:41LMST | | 07.11.2021 12:17:00 UTC | 07.11.2021 20:17:00 CST |
|---|
| Ve spolupráci s ESA proběhl první z pěti plánovaných testů přenosu dat z roveru Zhurong prostřednictvím evropské sondy Mars Express. |
174. Sol | 174. Sol | | 08.11.2021 UTC | 08.11.2021 CST |
|---|
| Rover Zhurong postupuje ve své cestě stále na jih a již urazil celkovou vzdálenost 1 253 m. Orbiter provedl v pořadí již pátý brzdící manévr v blízkosti pericentra své dráhy a přešel tak na finální vědeckou oběžnou dráhu, která mu umožní osnímkovat celý povrch planety v následujících 200 dnech. Na této dráze orbiter zůstane nejméně dalších 14 měsíců a poprvé také vyzkouší svůj podpovrchový radar. Nová oběžná dráha má periodu 7,08 h, pericentrum je ve výšce 265 km a apocentrum je vzdálené 10 7000 km od povrchu Marsu. |
186. Sol 09:27:21MT | 186. Sol 09:11:42LMST | | 20.11.2021 20:27:00 UTC | 21.11.2021 04:27:00 CST |
|---|
| Proběhl úspěšný přenos dat z roveru Zhurong prostřednictvím evropské sondy Mars Express. Komunikace proběhla na vzdálenost 4 000 km a komunikační okno trvalo 7 minut. Byla přenesena všechna odvysílaná data a ve velmi dobré kvalitě. |
196. Sol | 196. Sol | | 01.12.2021 UTC | 01.12.2021 CST |
|---|
| Rover urazil celkovou vzdálenost 1 297 m. |
225. Sol | 225. Sol | | 31.12.2021 UTC | 31.12.2021 CST |
|---|
| Rover urazil celkovou vzdálenost 1 400 m. |
255. Sol | 255. Sol | | 31.01.2022 UTC | 31.01.2022 CST |
|---|
| Rover urazil celkovou vzdálenost 1 524 m. |
293. Sol 15:19:57MT | 293. Sol 15:04:18LMST | | 11.03.2022 01:05:09 UTC | 11.03.2022 09:05:09 CST |
|---|
| Americká sonda MRO pořídila třetí snímek HiRISE přistávací oblasti TW-1. Na snímku je zřetelná stopa roveru Zhurong a dobře vitelný rover. |
300. Sol 00:00:00MT | 299. Sol 23:44:21LMST | | 17.03.2022 13:57:01 UTC | 17.03.2022 21:57:01 CST |
|---|
| Rover Zhurong je na Marsu již 300 solů. |
360. Sol | 360. Sol | | 18.05.2022 UTC | 18.05.2022 CST |
|---|
| V očekávání prachové bouře byl rover přepnutý do nouzového režimu. V tomto stavu bude i přečkávat nadcházející zimu. Předpokládá se, že rover obnoví svoji činnost až v prosinci s příchodem jara v Utopia Planitia. |
400. Sol 00:00:00MT | 399. Sol 23:44:21LMST | | 28.06.2022 07:55:45 UTC | 28.06.2022 15:55:45 CST |
|---|
| Rover Zhurong je na povrchu Marsu již 400. solů. |
470. Sol 15:19:16MT | 470. Sol 15:03:37LMST | | 08.09.2022 21:51:25 UTC | 09.09.2022 05:51:25 CST |
|---|
| Americká sonda MRO pořídila čtvrtý snímek HiRISE přistávací oblasti TW-1. Na snímku je dobře vitelný přezimující rover. |
475. Sol 15:24:55MT | 475. Sol 15:09:16LMST | | 14.09.2022 01:15:09 UTC | 14.09.2022 09:15:09 CST |
|---|
| Americká sonda MRO pořídila pátý snímek HiRISE přistávací oblasti TW-1. Na snímku je dobře vitelný přezimující rover. |
499. Sol 23:59:59MT | 499. Sol 23:44:20LMST | | 09.10.2022 01:54:29 UTC | 09.10.2022 09:54:29 CST |
|---|
| Rover Zhurong je na povrchu Marsu již 500. sol, kde v režimu hibernace přečkává zimní období v Utopia Planitia. |
Použité zdroje
[1] China National Space Agency
[2] The University of Arizona: High Resolution Imaging Science Experiment
[3] Wenhui Wan, Tianyi Yu, Kaichang Di, Jia Wang, Zhaoqin Liu, Lichun Li, Bin Liu, Yexin Wang, Man Peng, Zheng Bo, Lejia Ye, Runzhi Wang, Li Yin, Meiping Yang, Ke Shi, Ximing He, Zuoyu Zhang, Hui Zhang, Hao Lu and Shuo Bao, 2021, Remote Sensing: Visual Localization of the Tianwen-1 Lander Using Orbital, Descent and Rover Images.
[4] Zou Yongliao, Zhu Yan, Bai Yunfei, Wang Lianguo, Jia Yingzhuo, Shen Weihua, Fan Yu, Liu Yang, Wang Chi, Zhang Aibing, Yu Guobin, Dong Jihong, Shu Rong, He Zhiping, Zhang Tielong, Du Aiming, Fan Mingyi, Yang Jianfeng, Zhou Bin, Wang Yi, Peng Yongqing, 2021, Science Direct, Volume 67, Issue 2: Scientific objectives and payloads of Tianwen-1, China’s first Mars exploration mission.
[5] He Tian, Tianyi Zhang, Yang Jia, Song Peng, Chuliang Yan, 2021, The Innovation: Zhurong: Features and mission of China's first Mars rover.
[6] Chunlai Li, Rongqiao Zhang, Dengyun Yu, Guangliang Dong, Jianjun Liu, Yan Geng, Zezhou Sun, Wei Yan, Xin Ren, Yan Su, Wei Zuo, Tielong Zhang, Jinbin Cao, Guangyou Fang, Jianfeng Yang, Rong Shu, Yangting Lin, Yongliao Zou, Dawei Liu, Bin Liu, Deqing Kong, Xinying Zhu & Ziyuan Ouyang, 2021, Space Science Reviews: China’s Mars Exploration Mission and Science Investigation.