Polohy roverů na Marsu
Níže zobrazené mapy a tabulky jsou vytvořené z orthorektifikovaných a georeferencovaných mozaik snímků z kamer HiRISE a CTX sondy MRO a z GIS dat pohybu roverů na povrchu Marsu, které jsou volně dostupné na serverech NASA a USGS.
Mars Science Laboratory: rover Curiosity
Rover Curiosity putuje po povrchu Marsu od roku 2012. Pomalu, ale vytrvale stoupá po úpatí centrální hory Aeolis Mons v kráteru Gale. Během své cesty pořizuje vědeckými a inženýrskými kamerami úchvatné snímky okolí a pomocí vědeckého vybavení zkoumá povrch a prostředí Marsu. Rover je vybavený vrtačkou, pomocí které odebírá vzorky z hornin, které pak analyzuje v palubních laboratořích SAM a CheMin.
| Aktuální poloha roveru v areocentrických souřadnicích |
| Lon: |
137° 24′ 16,8″
137,404662° |
|
Lat: |
−4° 46′ 57,4″
355,217378° |
|
Elevace: |
−2 040m |
| Aktuální orientace roveru |
| Pitch: |
6,2° |
|
Yaw: |
145,7° |
|
Roll: |
−1,5° |
| |
| |
Celkový náklon roveru: |
6,3° |
| Aktuální poloha roveru v kartézských souřadnicích s počátkem v místě přistání |
| SF2_Y: |
−2 181m |
|
SF2_X: |
−11 432m |
|
SF2_Z: |
−779m |
| |
| |
Vzdálenost roveru od místa přistání: |
11 638m |
| Poslední jízda roveru |
| Sol: |
4346 |
|
RMC: |
110_840 |
|
Vzdálenost: |
24,9m |
| |
| |
Celková ujetá vzdálenost: |
32 817m |
| Souřadnice místa přistání v areocentrických souřadnicích a čas přistání |
| Lon: |
137° 26′ 29,9″
137,441633° |
|
Lat: |
−4° 35′ 22,1″
355,410533° |
|
Elevace: |
−4 501m |
| UTC: |
06.08.2012 05:17:57 |
|
Sol: |
0 15:03:08 |
|
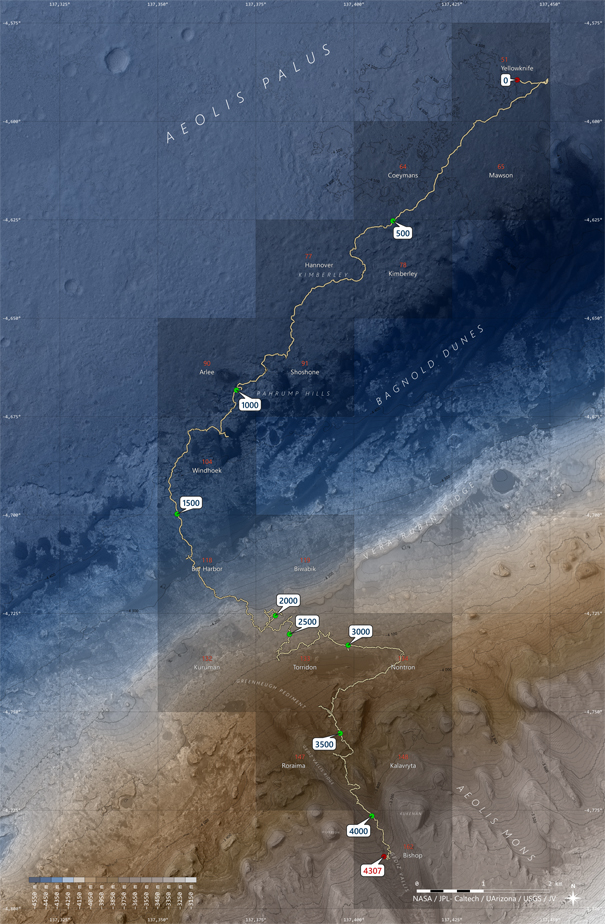 Oblast pohybu roveru Curiosity je rozdělená na mapové kvadranty. Mají rozměry 0,025°×0,025° a ve válcové projekci mapy jsou to čtverce. Číslovány jsou po řadách, každá řada obsahuje 14 kvadrantů. Kvadrant s číslem 1 má souřadnice levého horního rohu 137.225°E, 4.500°S. Kvadranty, kterými Curiosity projíždí, dostávají jména a jsou tematicky pojmenované po nějakém místě na Zemi.
Oblast pohybu roveru Curiosity je rozdělená na mapové kvadranty. Mají rozměry 0,025°×0,025° a ve válcové projekci mapy jsou to čtverce. Číslovány jsou po řadách, každá řada obsahuje 14 kvadrantů. Kvadrant s číslem 1 má souřadnice levého horního rohu 137.225°E, 4.500°S. Kvadranty, kterými Curiosity projíždí, dostávají jména a jsou tematicky pojmenované po nějakém místě na Zemi.
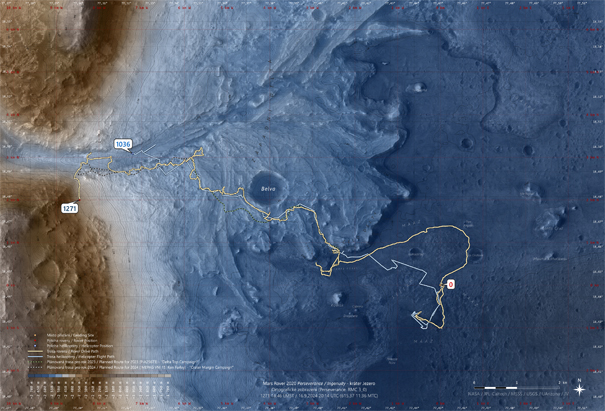
Mars 2020: rover Perseverance
Mise Mars 2020, která zahrnuje rover Perseverance a malý vrtulník Ingenuity, přistála v kráteru Jezero 18.2.2021. Rover Perseverance podobně jako rover Curiosity pořizuje nádherné snímky vědeckými a inženýrskými kamerami nádherné snímky okolí a pomocí vědeckých přístrojů zkoumá povrch a prostředí Marsu. I tento rover je vybavený vrtačkou, kterou odebírá vzorky.
Na rozdíl od roveru Curiosity však nemá palubní laboratoře pro jejich analýzu. Odebrané vzorky jsou uschované ve speciálních pouzdrech, které rover předá připravované misi Mars Sample Return, vzorky budou dopravené na Zemi a analyzovány v pozemských laboratořích.
| Aktuální poloha roveru v areocentrických souřadnicích |
| Lon: |
77° 17′ 30,2″
77,291729° |
|
Lat: |
18° 28′ 07,4″
18,468727° |
|
Elevace: |
−2 040m |
| Aktuální orientace roveru |
| Pitch: |
3,6° |
|
Yaw: |
7,5° |
|
Roll: |
7° |
| |
| |
Celkový náklon roveru: |
7,9° |
| Aktuální poloha roveru v kartézských souřadnicích s počátkem v místě přistání |
| SF3_Y: |
−8 937m |
|
SF3_X: |
1 431m |
|
SF3_Z: |
−530m |
| |
| |
Vzdálenost roveru od místa přistání: |
9 051m |
| Poslední jízda roveru |
| Sol: |
1311 |
|
RMC: |
61_1928 |
|
Vzdálenost: |
61,9m |
| |
| |
Celková délka trasy: |
30 539m |
| Souřadnice místa přistání v areocentrických souřadnicích a čas přistání |
| Lon: |
77° 27′ 03,2″
77,450886° |
|
Lat: |
18° 26′ 40,7″
18,444627° |
|
Elevace: |
−2 570m |
| UTC: |
18.02.2021 20:43:48 |
|
Sol: |
0 15:53:20 |
|
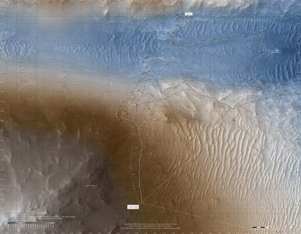
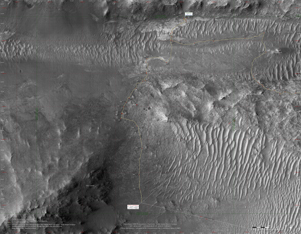
 Pohled pravou navigační kamerou na vršek Delty a koryto bývalé řeky ze současné pozice Perseverance.
Pohled pravou navigační kamerou na vršek Delty a koryto bývalé řeky ze současné pozice Perseverance.
Mars 2020: vrtulník Ingenuity
Vrtulník Ingenuity absolvoval celkem 72 letů v atmosféře Marsu. Poslední let, který proběhl v solu 1036 / 19.1.2024, nedopadl dobře. Během přistání měl vrtulník příliš velkou horizontální rychlost a přistání bylo velmi tvrdé. V důsledku toho došlo k poškození vrtulí vrtulníku. Na jedné vrtuli odlétl celý jeden list a zbývající tři listy přišly zhruba o 1/3 délky.
Stojí však v normální vzpřímené poloze a jeho elektronika přistáním neutrpěla. Vrtulník tedy dostal nové programové vybavení a stala se z něho stacionární sonda. Nemá sice žádné vědecké vybavení, ale pomocí inženýrských senzorů může monitorovat okolní prostředí. Naměřená data ukládá do paměti a někdy v budoucnosti si je může některá z dalších sond stáhnout.
| Konečná poloha vrtulníku v areocentrických souřadnicích |
| Lon: |
77° 19′ 21,1″
77,322534° |
|
Lat: |
18° 29′ 50,2″
18,497269° |
|
Elevace: |
−2 399m |
| Orientace vrtulníku |
| Pitch: |
−19° |
|
Yaw: |
170° |
|
Roll: |
6,2° |
| |
| |
Celkový náklon vrtulníku: |
19,9° |
| Konečná poloha vrtulníku v kartézských souřadnicích s počátkem v místě přistání |
| SF3_Y: |
−7 206m |
|
SF3_X: |
3 119m |
|
SF3_Z: |
−171m |
| |
| |
Vzdálenost vrtulníku od místa přistání: |
7 852m |
| Malá statistika letů vrtulníku Ingenuity |
| Celkový počet letů: | 72 |
| Kumulativní doba letu: | 02:08:55 ( 7 735 s ) |
| Celková délka trasy: | 17 247m |
| Nejdelší let ( let č. 25 ): | 709m |
| Nejdelší doba letu ( let č. 12 ): | 00:02:49 ( 170 s ) |
| Nejvyšší dosažená horizontální rychlost ( let č. 62, 68, 69 ): | 10m/s ( 36 km/h ) |
| Největší dosažená výška na terénem ( let č. 61 ): | 24m |
| Největší převýšení mezi místem startu a místem přistání ( let č. 42 ): | 22,8m |
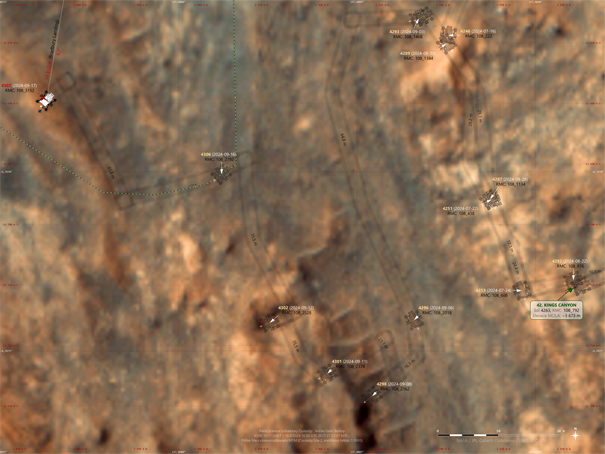
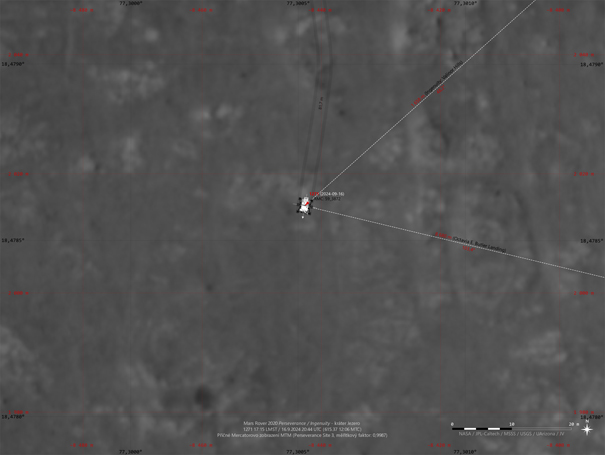
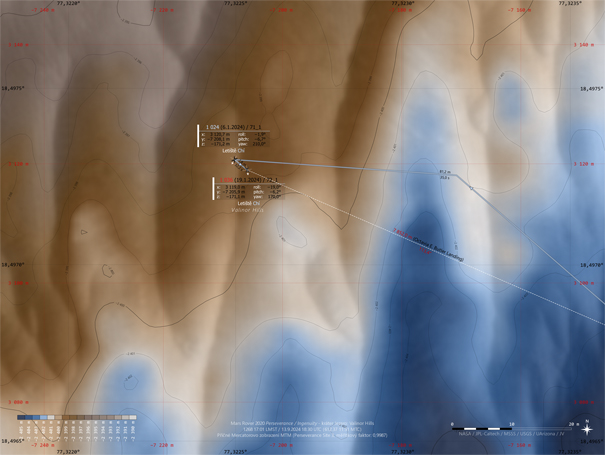 Mapka zobrazuje místo přistání při letu č. 72. Dostalo jméno Valinor Hills podle románů J. R. R. Tolkiena.
Mapka zobrazuje místo přistání při letu č. 72. Dostalo jméno Valinor Hills podle románů J. R. R. Tolkiena.
 Ingenuity po neúspěšném přistání při 72. letu. Na snímku je vidět chybějící list jedné vrtule a poškození dalších listů (dobře je to vidět na stínu vrtulí na povrchu). Snímek pořídila Perseverance kamerou SuperCam RMI ze vzdálenosti 416 m.
Ingenuity po neúspěšném přistání při 72. letu. Na snímku je vidět chybějící list jedné vrtule a poškození dalších listů (dobře je to vidět na stínu vrtulí na povrchu). Snímek pořídila Perseverance kamerou SuperCam RMI ze vzdálenosti 416 m.
Použité zdroje
[1] NASA / JPL-Caltech: Where is Perseverance?
[2] NASA / JPL-Caltech: Where is Curiosity?
[3] The University of Arizona: High Resolution Imaging Science Experiment
[4] USGS Astropedia: Lunar and planetary cartographic catalog